Bearing Calculator Configuration
Creating a Bearing Localiser module
From the File > Add Modules > Localisers menu, select “Bearing Calculator”. Enter a descriptive name for the new module and press OK.
Configuring a Bearing Calculator module
Note: A suitable Source module should be configured before configuring the Bearing Calculator. See below for details of acceptable sources.
From the Settings menu, select “Bearing Calculator settings”. This will open up a new dialog containing 3 tabs: Source, Channel Groups and Algorithms.
Source tab
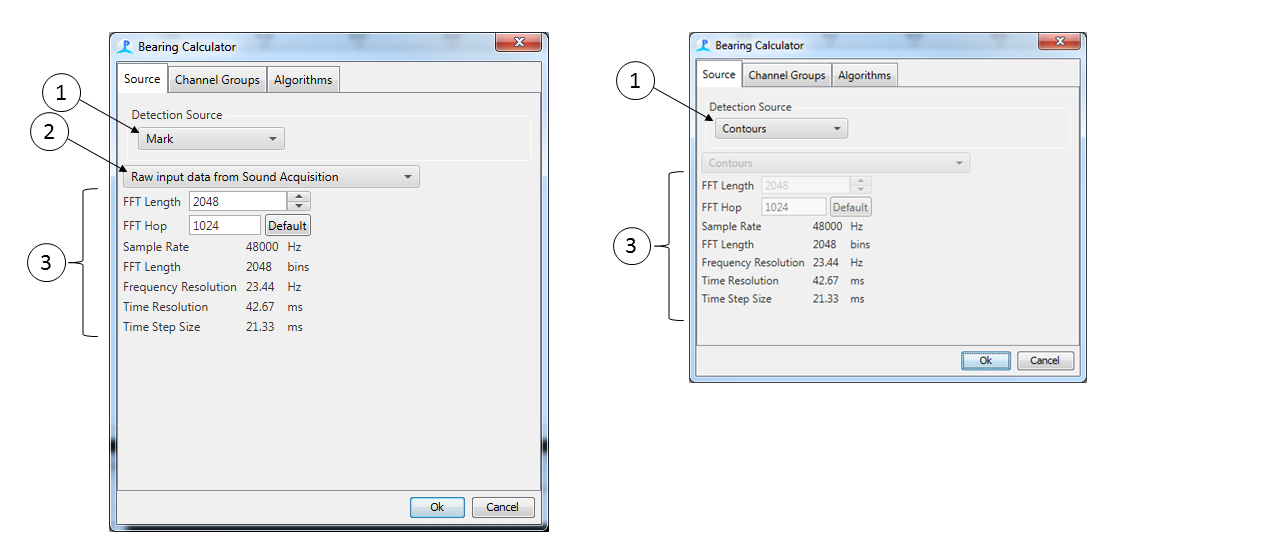
Detection Source: Which module triggers the Bearing Calculator. Many different detector modules can be used, including Click Detector, Whistle and Moan Detector, Spectrogram Annotation Marks, etc.
Data Source: Where the Bearing Calculator actually gets it’s data from. If the Detection Source already has suitable acoustic data with which to perform calculations, such as the Click Detector or Whistle & Moan Detector, this drop-down menu is disabled and the Detection Source is used for the Data Source (see image above right). If the Detection Source does not contain data, such as a Spectrogram Mark, the data source needs to be selected here (see image above left). The Data Source can be raw audio data or FFT data.
FFT Parameters: If the Data Source is raw audio data, the FFT parameters to use for bearing calculations should be specified here. If the Data Source is already FFT data, the information here is for reference only and cannot be modified.
Channel Grouping tab
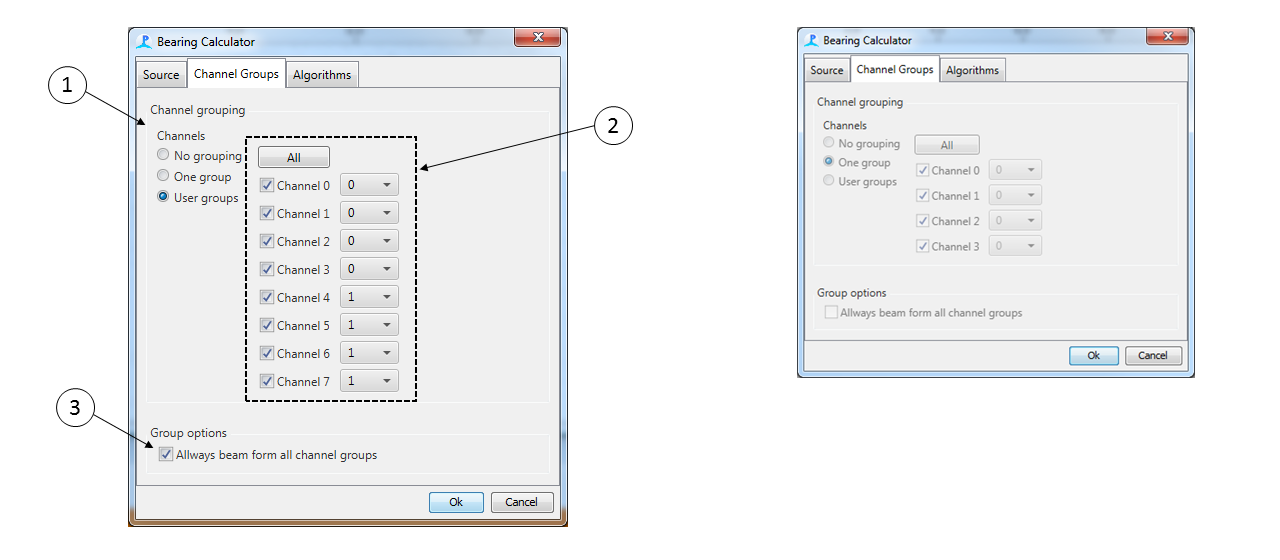
If the Data Source on the Source tab already has channel grouping definitions (such as an FFT Module, Whistle & Moan Detector, Click Detector, etc), the channel grouping from that source is used here and cannot be modified (see image above right). If the Data Source does not define channel groups (such as Raw Audio Data), the grouping must be done here (see image above left).
Channel Group Type: Select how the channels should be grouped, either No Grouping, a Single Group, or multiple (User) Groups.
Channel Grouping: When a data source is selected, the dialog will show a series of check boxes - one for each channel available from that Source. Select the channels you want to use for bearing calculation, then to the right of each channel check box, assign the channel to a group. The group numbers themselves are not important - they just need to be different for each group.
The bearing algorithm will combine the information from all channels in a group and output the resulting signal. If there are multiple groups defined, there will be multiple output signals. In such a case, each signal will be identified by the group number.
In the above left image 2 groups have been defined, each with 4 channels.
If a detection is made in a single group, the channels in that group are used for bearing calculations and there is one set of output data. If this checkbox is selected, then bearings will be calculated for ALL groups when there is a detection in one of them. The timing information from the group with the detection is used for the groups without a detection, in order to calculate the bearing data.
Care should be taken when selecting this option. If the hydrophone spacing is large between groups, the timing information from the group with the detection may not be applicable to the other groups. It is possible that the signal of interest would be missed, and resultant bearing data incorrect.
Algorithms tab
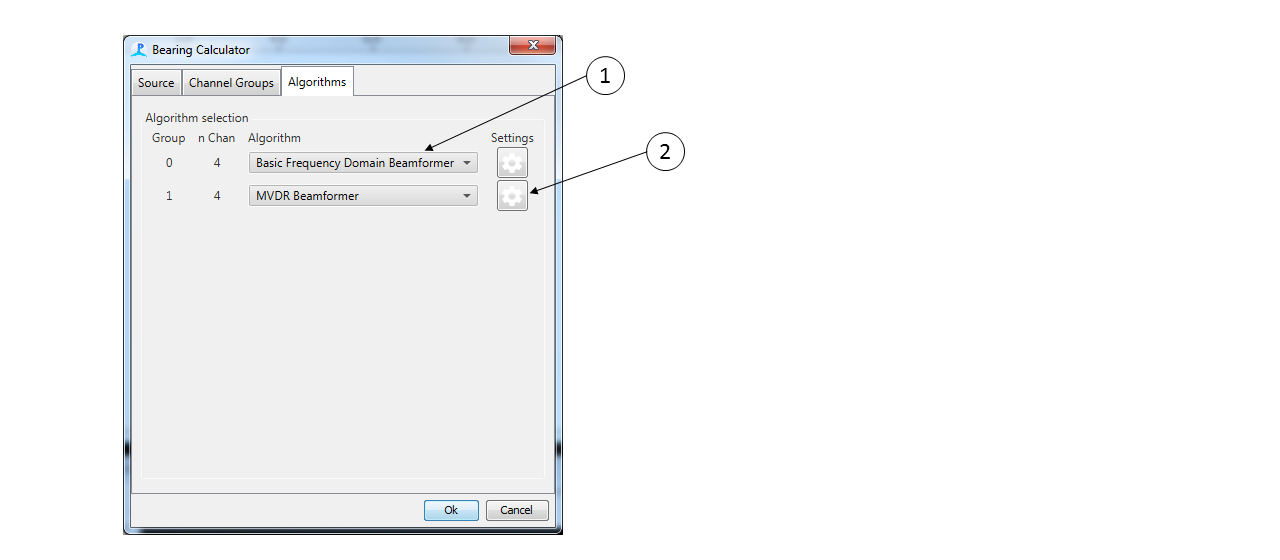
The user is able to select a beamformer algorithm for each group defined on the Channel Groups tab. The window displays the group number, and the number of channels associated with that group.
Algorithm: specify which algorithm to use for this group. There are 3 types of algorithms available: Basic Frequency Domain beamformer, Minimum Variance Distortionless Response beamformer (MVDR), and Time Of Arrival Difference (TOAD).
The Basic Frequency Domain beamformer algorithm combines the signals from multiple channels into a single output using a static set of weights.
The MVDR also combines the signals from multiple channels into a single output, but uses an adaptive weighting scheme which seeks to minimize the variance of the input signal. The MVDR is more processor-intensive, but may result in better noise reduction and signal amplification.
TOAD seeks to calculate bearings based on the difference in detection time between pairs of hydrophones. It is the technique used internally by the Whistle & Moan Detector module to calculate bearings to whistles.
Settings: press the settings button to open up the settings for the algorithm in a new dialog.