Time Difference of Arrival
Many localisers use Time Difference of Arrival (TDOA) of signals on multiple hydrophones to estimate locations, whether it be just a bearing calculation, or a full 3D location. Even when using localisation algorithms such as the Group 3D Localiser Crossed Bearing algorithm it’s likely that the bearings being crossed will have been derived from TDOA measurements.
TDOA measurements are most often made by finding the peak in the cross correlation function of the signal waveform recorded at each hydrophone.
TDOA measurement are more accurate for louder signals and can be made more accurate through careful filtering of data, up-sampling, and interpolation (Gillespie and Macaulay, 2019).
Exactly how PAMGuard calculates a TDOA for a given detector depends slightly on the type of detection, what data are included with the detection and also on how far apart hydrophones are spaced.
Clicks
Transient sounds from the click detector are stored with a short waveform clip which is used for TDOA measurement. There are a number of options available to control how the TDOA measurement is made, broadly following the examples in Gillespie and Macaulay (2019). It is also possible to select different settings (e.g. different frequency ranges for filtering) based on the classification of individual detected clicks.
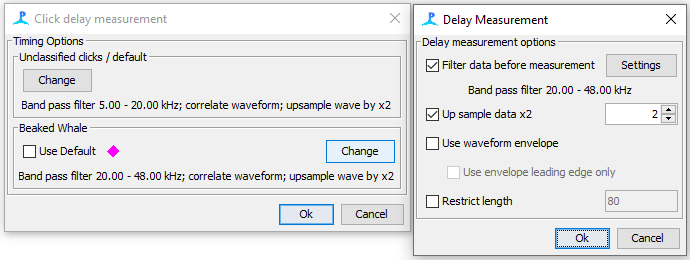
Timing configuration options for the click detector are available from within the main Settings dialog of the Click Detector, or through a settings button in the configuration of the Group 3D localiser when a TDOA based algorithm is selected.
Spectrogram based detectors
Several detectors, including the Whistle and Moan detector and the GPL detector search a spectrogram of audio data to detect sounds. These detectors tend not to store the waveform of the detected sound (as is the case for the click detector) but do often store the time-frequency contour of the detection. For these detectors, TDOA’s are calculated from the Complex FFT data used as input to the detection algorithm. Note that this is mathematically the same as a waveform cross correlation, so time resolution (with interpolation) is still better than a single sample, and is NOT the time resolution of the FFT data frames. For detectors providing detailed time-frequency contour information, the cross correlation is restricted to the frequency limits of the detection.
Generally, there are no options controlling how the cross correlation of the spectrogram data is conducted, but some localisers may need you to select the correct source of FFT data appropriate to the detector.
Localisers requiring a time delay will calculate the maximum possible time delay between two hydrophones. If this time delay is less than half the length of an FFT frame, then the cross correlation is simply the sum of the cross correlations of all FFT frames included in the detection, with a 1:1 match between the FFT frames from the different channels of data. Where the maximum time delay is greater than half a FFT frame, then data from each pair of channels will be ‘slid’ across one another, and the total cross correlation calculated for all possible time delays, the best correlation value being selected.
Some localisers also offer the option of selecting raw sound data for input to the TDOA calculation. In this instance, it will recalculate the FFT data, which is probably a waste of time if the FFT is already calculated.
References
Gillespie, D., and Macaulay, J. (2019). “Time of arrival difference estimation for narrow band high frequency echolocation clicks,” The Journal of the Acoustical Society of America, 146, EL387-EL392.