Configuration
From the File > Add Modules > Localisers menu, select “Group 3D Localiser”. Enter a descriptive name for the new module and press OK.
Configuring the Group 3D localiser
Before configuring the Group 3D Localiser you should have configured the detector you plan to use it with and correctly set up the hydrophone array. Consider testing your configuration with simulated sound source before trying it with real data.
Detection source and group matching options
From the main PAMGuard settings menu, open the Group 3D Localiser dialog and select the source of detection data.
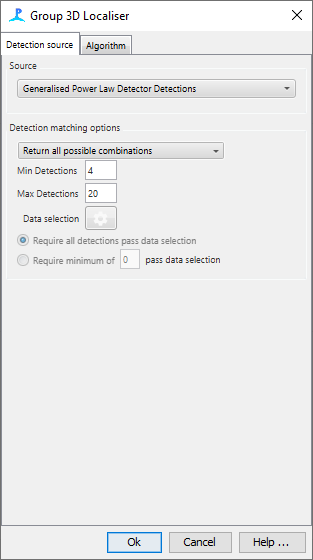
Detection Matching
As the selected detector creates detections, the Group 3D Localiser will try to put them into groups ready for localisation. Select the minimum number of detections to include in a localisation attempt. This should be at least the minimum number required by the selected algorithm, but may be higher depending on the number of hydrophones you think detections should occur on. If sounds are far apart in time and the detector is working well then there will be one detection per channel and a group with that number of detections will form. However, detections may not occur on all hydrophones and some hydrophones may have more than one detection (if sounds were being produces at a high rate, or there are false detections). The initial grouping is based purely on what may be possible based on the time of arrival differences between the different hydrophones. In a worst-case-scenario a group might become infinitely long, so a maximum number of sounds allowed in a group can also be specified.
Data selection
Some detectors have a built in data selector (for instance the Click Detector, when used with it’s click classifier allows you to select only clicks that meet certain classification criteria, the Whistle and Moan detector allows you to select whistles based on their duration and frequency range, etc.). If a data selector is available, set it to select only the detections of interest.