Simplex
This algorithm uses a Simplex to estimate a most likely position for a sound source based on Time Difference of Arrival measurements on multiple hydrophones.
Two and Three dimensional versions of the algorithm are available. Select the one most suitable for your array geometry. Note that even with a 2D array, a better fit may be obtained using a 3D model than with 2D. As a general “rule of thumb”, if the vertical position of the animal is likely to be a significant fraction of the array dimension, then you’re probably better off using the 3D model. If on the other hand, the array is large and in shallow water, so that the vertical position can only ever be a small fraction of the array dimension, then the 2D model may be more stable.
The minimisation function used by the Simplex is created in the following manner:
- The propagation delay from the location to each hydrophone is calculated.
- From these values, the difference in time delay for each hydrophone pair is calculated.
- An estimate of the error on each time delay is calculated based on the errors on hydrophone locations entered into the Array Manager, the entered sound speed error and the relative orientation of the hydrophone pair to the location. The measured time delays from the appropriate TDOA calculation are compared to the calculated values for that pair, and a ?2 value constructed from the differences in measured and expected times divided by the expected errors.
The Simplex / Nelder-Mead algorithm then moves the location around to minimise the ?2 value.
Configuration
To configure, select “Simplex 2D” or “Simplex 3D” from the list of available algorithms. Timing and channel configuration options will be shown.
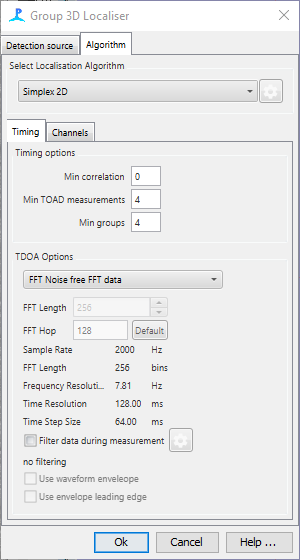
It is possible to set a minimum correlation value for each time delay, any hydrophone pair with a cross correlation value smaller than this being excluded from the minimisation function.
Consequently, it is also possible to set a minimum number of TOAD measurements to use in the localisation, the localisation attempt being aborted if not enough hydrophone pairs can return adequate correlations between signals.
If hydrophones are arranged in groups (e.g. a click detector operating on multiple small hydrophone clusters as in Gillespie et al, 2020) then you can also define a minimum number of groups to use in a localisation.
Timing (TDOA) options, displayed below the algorithm selection, may vary depending on the type of detector used.
References
Gillespie, D., Palmer, L., Macaulay, J., Sparling, C., and Hastie, G. (2020). “Passive acoustic methods for tracking the 3D movements of small cetaceans around marine structures,” PLoS ONE, 15 (5), 16pp. doi:https://doi.org/10.1371/journal.pone.0229058