GPS Processing
Adding an GPS Processing Module
To add a new GPS Data Collection module to PAMGuard, select the File->Maps and Mapping->GPS Processing menu item.
Note that it is only possible to have one GPS Processing module in PAMGuard, so the menu item will be greyed out if a module has already been added.
Setting the GPS Parameters
From the Detection Menu, select GPS>GPS Options ?
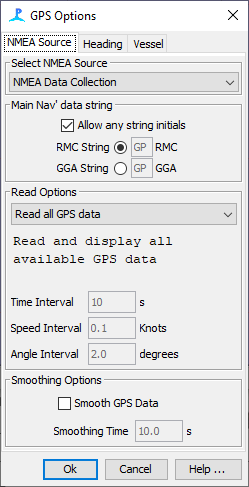
Select NMEA Data Source
Select the NMEA data source from the drop down list. If there are no NMEA Data Collection modules in the current PAMGuard model, you must close the GPS Options dialog and add one.
Read Options
Three options for reading and storing GPS data are available.
Read all GPS data: all GPS data will be used, however often they arrive (typically once per second).
Read at fixed time intervals: GPS Data will only be used at fixed time intervals (say 10s).
Read on timer or course of speed change: GPS data will be used at fixed time intervals or whenever the course or speed change.
The latter options minimises the amount of data stored when undertaking straight line transects. PAMGuard will interpolate between GPS positions, so it is possible to set a relatively long time interval (say 1 minute) for regular reads, but data will get read more often if there are course or speed changes.
Heading Data
A GPS receiver can only directly measure a vessels position in space. GPS receivers output course information based on successive measurements of position. This course is therefore the direction the vessel is moving in relative to the earth, which is not necessarily the direction the vessel is pointing in. For instance, the vessel may be moving sideways in a cross current.
The course information from a GPS is generally referred to as Course Over Ground, or COG.
A number of options exist for reading the true heading of a vessel, i.e. the direction it is pointing in. These are:
A gyro compass (Generally only available on larger vessels. Gives a heading relative to true North)
A fluxgate compass (A cheaper options which measures the magnetic heading of the vessel)
A twin GPS heading sensor (Two GPS receivers close together. The relative positions of the two receivers are accurate enough to give true heading
Most of the above devices will output an NMEA string GPHDT which contains either the true or the magnetic heading information, depending on the type of sensor.
PAMGuard can read the GPHDT string and will add the heading information to the data from the GPS receiver. The heading data are displayed on the map and are also written to the GPSData database table
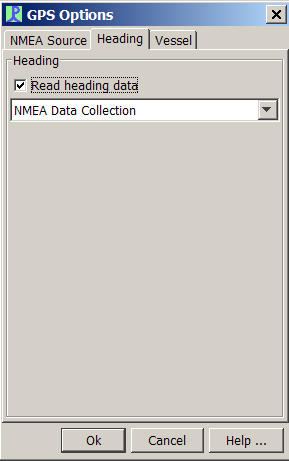
To read heading data, go to the Heading tab, check the ‘Read heading data’ check box. Then select the NMEA data source. Note that with some NMEA installations, the heading data string may be in the same multiplexed data as the GPS data, in others, it may be on a separate serial data stream.
Vessel Options
Clicking the vessel tab allows you to specify where the GPS receiver is on the vessel.
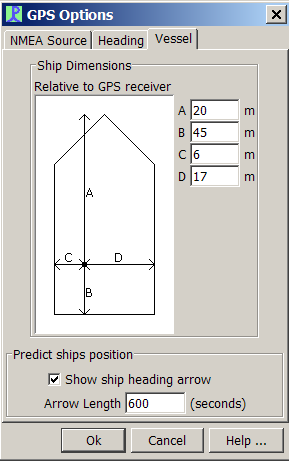
Enter the ships dimensions and select an optional heading arrow to be shown on the map. These parameters affect displays only and have no other effect on PAMGuard operation.