Bearing Calculator Output
Basic Frequency Domain and MVDR beamformer Output
The output image shown below was generated using simulated right whale calls located 90 degrees to the ship heading.
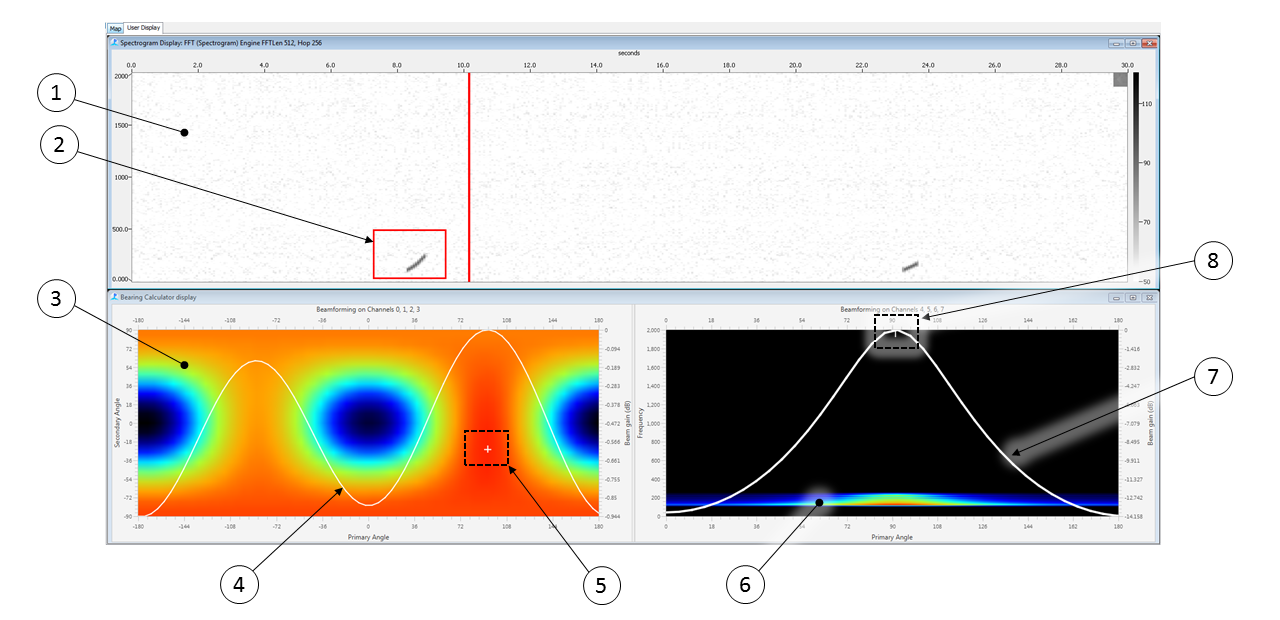
Standard spectrogram, using FFT Engine as source
A whistle selected using the Spectrogram Annotation module.
Bearing localiser output for a Volumetric Array. The chart shows the amplitude (represented by the colour) vs. Primary and Secondary angles. The data for each point is averaged over all frequencies.
The white line shows the amplitude as a function of Primary angle.
The plus sign indicates the point of highest gain. This primary/secondary angle position is output as the bearing of the detection.
Bearing localiser output for a Linear Array. The chart shows the amplitude (represented by the colour) vs. Frequency and Primary angle.
The white line shows the amplitude as a function of Primary angle.
The plus sign indicates the point along the line of highest gain. This primary angle is saved as the bearing of the detection.
TOAD Output
The output image shown below was generated using simulated right whale calls located 90 degrees to the ship heading.
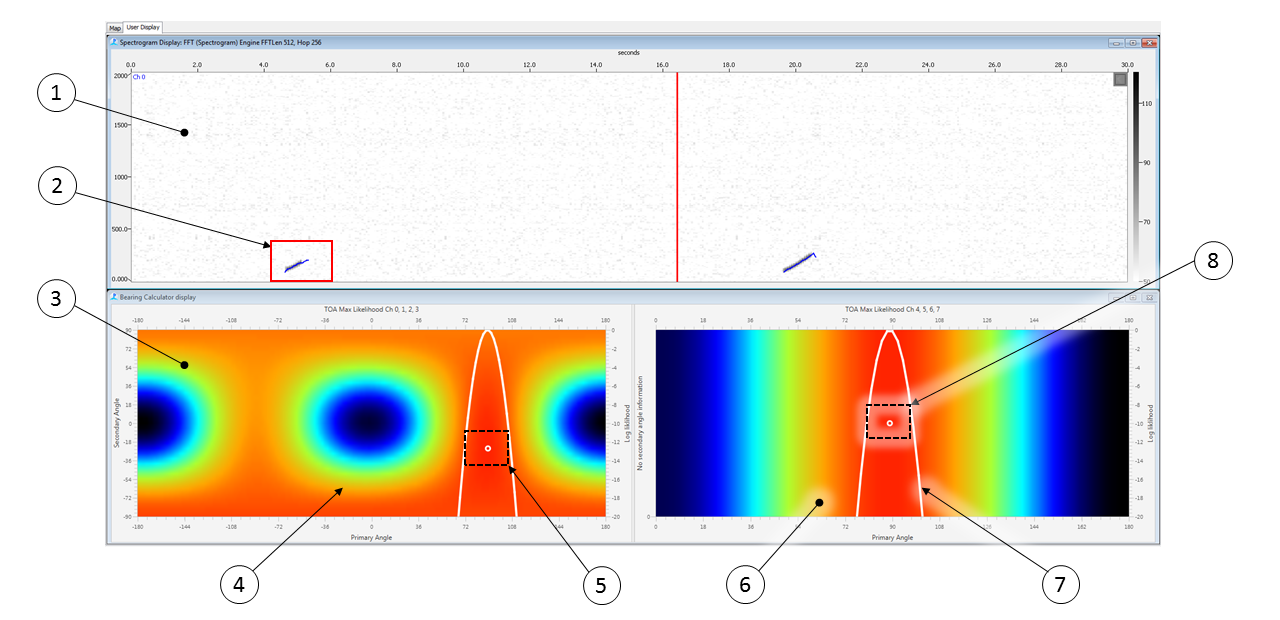
Standard spectrogram, using FFT Engine as source
A whistle selected using the Spectrogram Annotation module.
Bearing localiser output for a Volumetric Array. The chart shows the log likelihood (represented by the colour) vs. Primary and Secondary angles.
The white line shows the log likelihood as a function of Primary angle.
The circle indicates the point of highest likelihood. This primary/secondary angle position is output as the bearing of the detection.
Bearing localiser output for a Linear Array. The chart shows the log likelihood (represented by the colour) vs. Primary angle. Since there is no Secondary angle information, the output appears as vertical bars.
The white line shows the log likelihood as a function of Primary angle.
The circle indicates the point of highest likelihood. This primary angle is saved as the bearing of the detection.